Table of Contents
Application Layer in AUTOSAR – Introduction
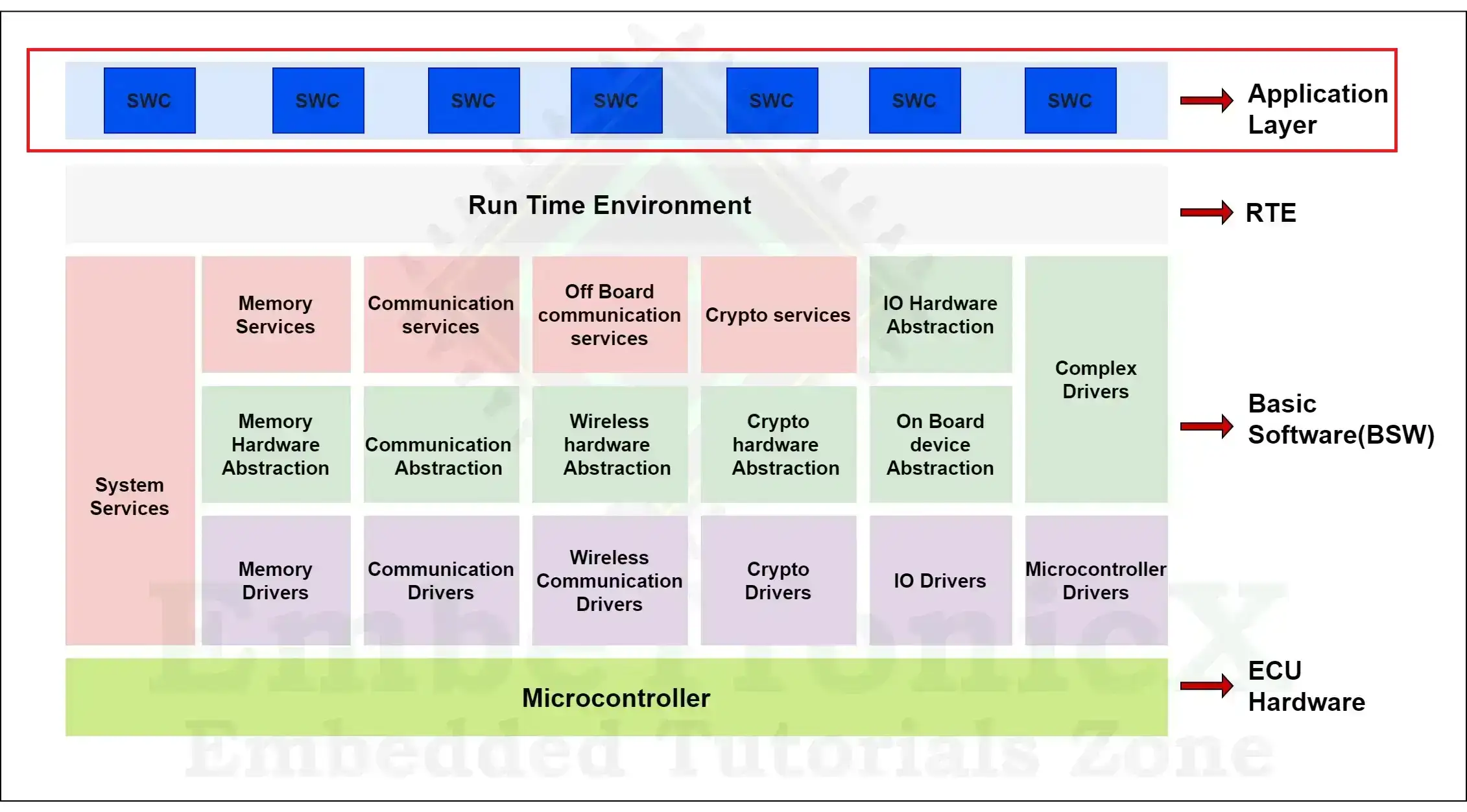
Software Component (SWC)
The below image represents the typical view of Software component (SWC),
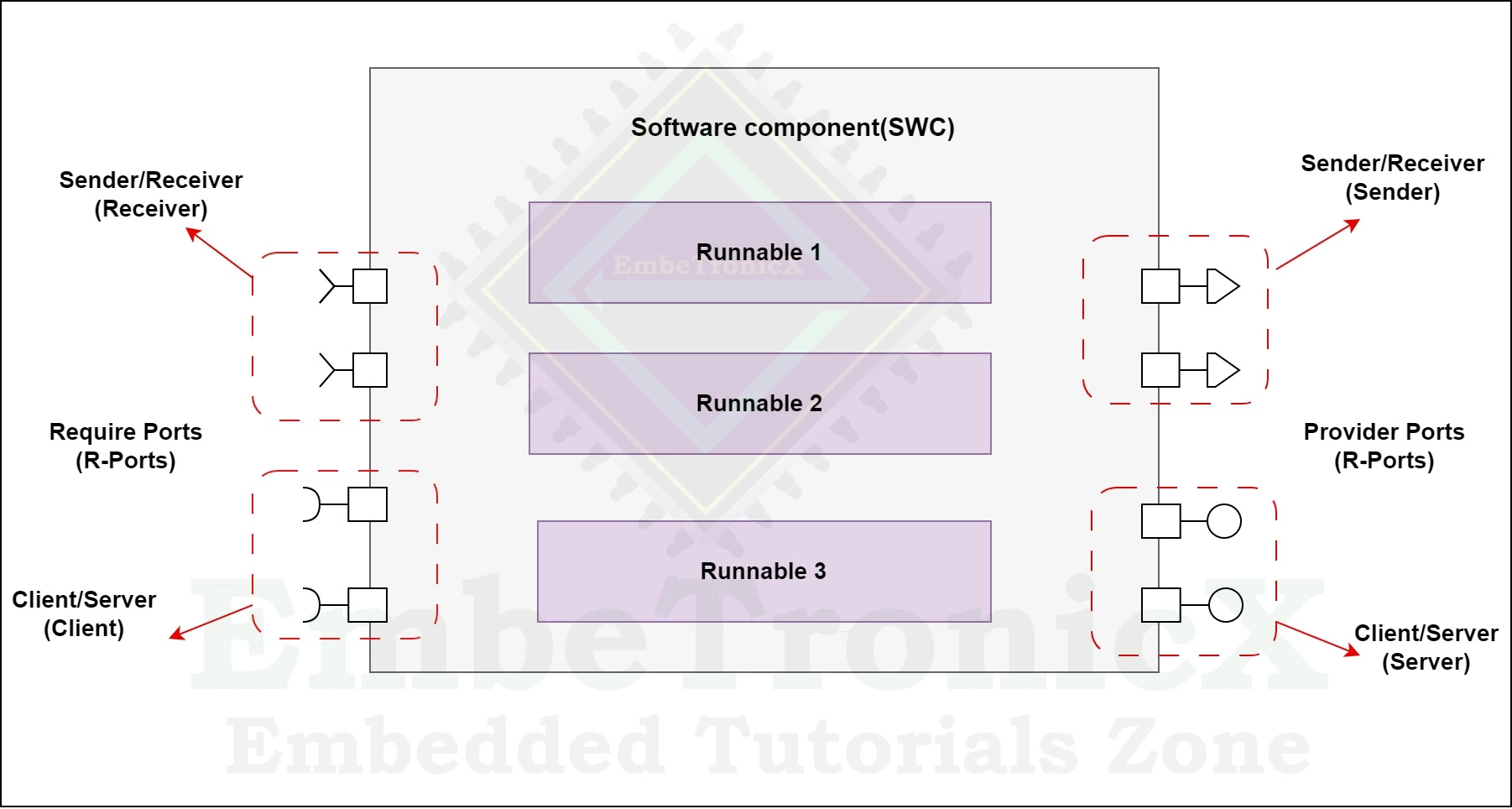
The software component is a small application that is created for some specific functionality in ECU. The main purpose of having a software component is to make the software independent of hardware and make the software reusable. while creating a new component type under the application component type in the DaVinci Developer tool, the developer needs to select either one of the types mentioned below.
|
|
|
There are 2 types of software components. they are,
Atomic SWC
An atomic software component is a self-contained unit which is having application software. It encapsulates the implementation of the functionality. It only exposes the connection points to the outside world through the port prototype.
Under Atomic SWC there are a few sub-types,
- Application SWC – This is normal hardware-independent application software.
- Sensor/Actuator SWC – This is used to handle sensor and Actuator input/outputs.
- Non-volatile memory block SWC – This is used when we are using NVRAM.
- Calibration parameter SWC- This is used for sharing calibration parameter values with other devices.
- Complex device driver SWC- This is used when we are developing complex device drivers which are not supported by AUTOSAR.
- Service SWC- This is used when we are using services provided by the service layer which is placed in the BSW layer.
- Service proxy SWC- It serves as a proxy to one or more remote ECUs, providing internal services. Its primary function is to distribute vehicle mode information across the system.
- ECU abstraction SWC- This is used to access the I/O by directly interacting with specific BSW modules.
Composition SWC
Composition SWC is a group of individual software components combined into one software component to make the ECU. This type of grouping facilitates abstracting SWCs and standardizing software development.
Runnable Entity
As discussed earlier, application software components are having certain entities, those are called as the Runnable, which are basically embedded c logics. During configuration with the help of tools, a skeleton is generated in respective source files of SWCs, later developers must write their logic inside the skeleton to run the specific task.
|
|
|
There are 3 types of runnable entities,
Init Runnable
The Init Runnable is an important part of the AUTOSAR architecture as it allows the ECU to perform the necessary tasks during the initialization phase and prepare for normal operation. These can be used to verify that the controller is properly configured and ready to perform its intended function.
Periodic Runnable
If an executable is configured as Periodic, it will be called periodically at the configured time. So the developer needs to give the minimum interval during configuration.
Server Runnable
This is used to provide services to other components in the system. This is typically triggered by an external request, such as a request from another component to access certain data or perform a certain task.
Trigger points
While configuring runnable developers must mention the trigger point type as well as access points, and trigger points, it tells under which condition the runnable needs to be triggered or called. There are few types of trigger points are mentioned below,
|
|
|
- Init
- Periodic
- Background
- On-data reception
- On-data reception
Access point type
In case if the runnable wants to use the port prototype, the developer must mention the access point type. The types of access points are,
- Read data
- Write data
- Invoke operations
- Read received mode
Ports
In AUTOSAR, all communication between SWC and lower layers is done using ports. A port is a channel or connection used to transmit data between SWCs or BSW modules. Since AUTOSAR is intended for standardization, the data that will be transferred between entities must be known at configuration time. Ports belong to exactly one SWC at a time. The port may or may not be connected to the other end. Connectors are used to connect two ports.
There are two types of ports,
1. Required Ports(R-Port)- This type of port is used when data is to be received or required.
2. Provider Ports(P-Port)- – This type of port is used when data is to be transmitted or SWC is a provider of some service to other entities.
|
|
|
Port Interface
The Port interface acts as a door between software components (SWC) to communicate with one another. The term Port Interface refers to the highest level of description of information transferred between components in an AUTOSAR system. The Port interface is reusable, and it is configured during the system configuration phase.
There are two types of port interfaces,
Sender/Receiver interface
In this type of communication interface data elements are transferred from one software component to another. The data element type may be int, float, char, array, and record. This interface is mostly used between application software components. A port may contain many data elements. The communication between software components is 1: n or n:1.
Syntax
Rte_Read_<port name>_<data element>
|
|
|
Rte_Write_<port name> _<data element>
Client/Server interface
The Client calls an operation of a Server asynchronously or synchronously. Communication between client and server is 1:1 or n:1. Operations can be called individually. This communication interface takes place most frequently between the application and services of the Basic Software (diagnostics, memory management, etc.). The operation may be requesting for turn on the light and get some data from memory, etc.,
Syntax
Rte_Call_<port_name>_<operations_name>
Example
To understand better the concept of SR Interface and CS Interface let’s take the below example,
|
|
|
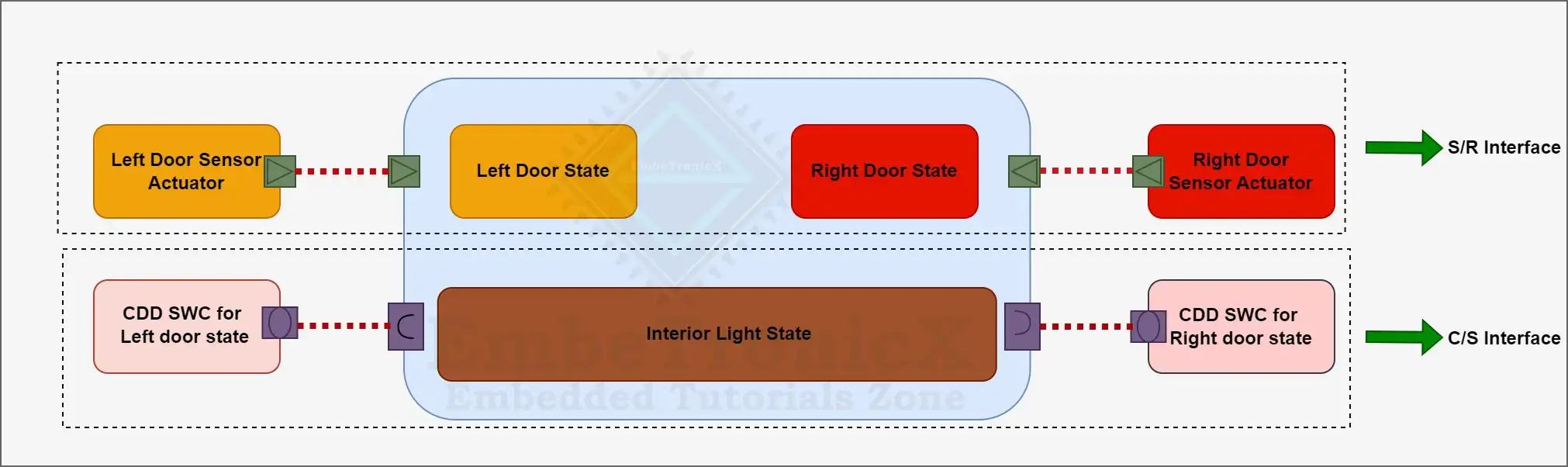
We have two sensor actuators one is for right door motion and another one is for left door motion called Right Door Sensor, Left Door Sensor, and right Door Sensor is a Sender port(P- Port) it will write the door state and Left Door State, and the Right Door State is an SWC’s is a Receiver Port(R-Port) it will read the door state.
CDD SWC for the Right door state and CDD SWC for the Left door state are acting as Server Ports (P- Port) it will get the input from Actuators, and it will serve the door state and Interior Light state acting as a Client Port(R-Port) and it will get the interior light state whether it is ON or OFF based on door state.
Port Prototypes
Port Prototypes are intended to be used for attaching Software Connectors that establish an actual connection between SWC prototypes.
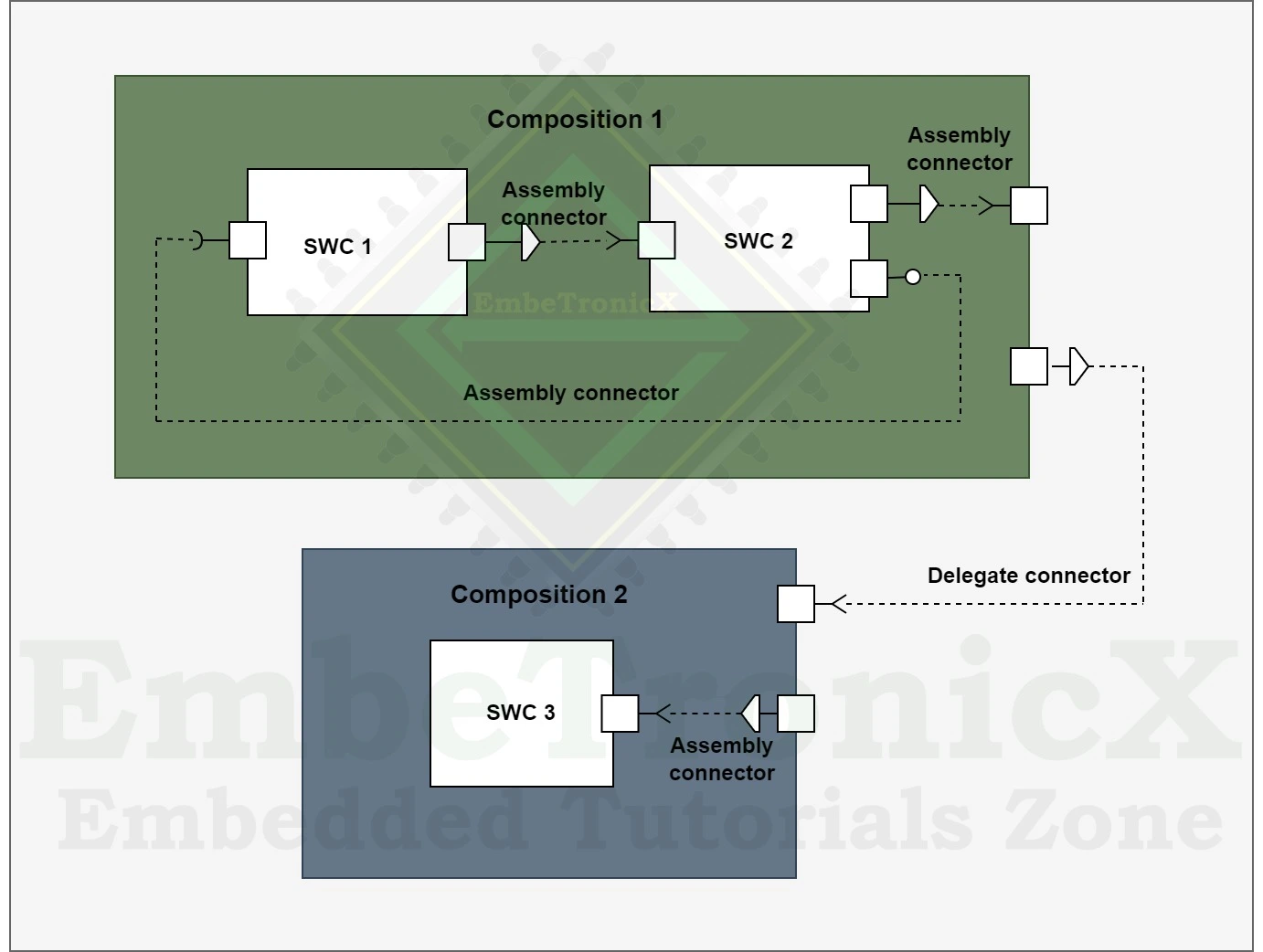
Connectors
A connector is used to complete the connection between the port prototypes.
There are 2 types of connectors,
|
|
|
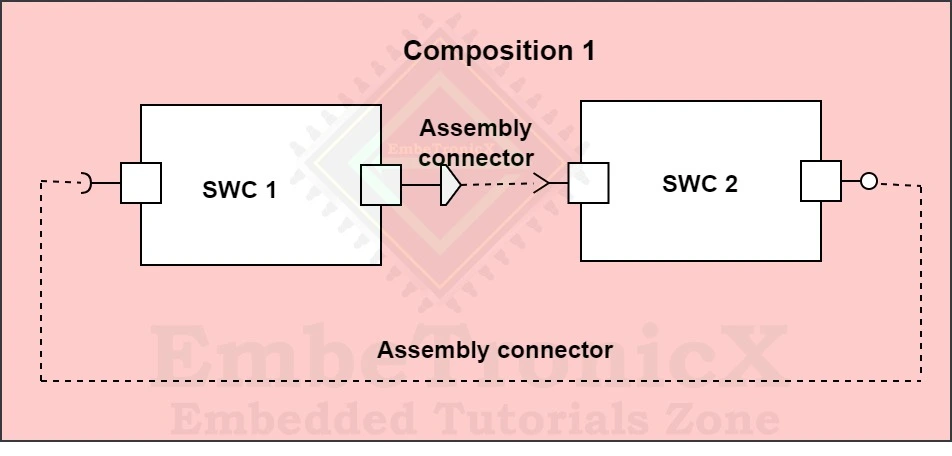
Assembly connector
Assembly connectors are used to connect two ports in a single software component.
Delegate connector
Delegation connectors are used when some port of SWC needs to be exposed to the outer world of the Composition (ECU).
Summary
|
|
|
Embedded Software Developer who is passionate about Embedded Systems.
